
/ STM8 GPIO I.|
/ Úvod |
Zkratkou GPIO (General Purpose Input Output) se označují vstupy/výstupy či též "vývody" nebo "piny" mikrokontroléru. Tyto vstupy a výstupy jsou tím nejdůležitějším co musíte při práci s mikrokontrolérem ovládat. Skrze GPIO může mikrokontrolér vnímat a ovládat okolní svět. Prakticky neexistuje aplikace kdy by mikrokontrolér vstupy a výstupy nepotřeboval. Protože k GPIO se připojuje veškerý okolní hardware je nutné znát a dodržovat jejich elektrické parametry a limity. Je toho docela hodně, takže se rovnou pustíme do práce.
/ GPIO na STM8S |
Z dílu o Nucleo kitu už víte jak jsou rozloženy vývody mikrokontroléru na postranních konektorech. Taky jste se tam dočetli že na vývodu PC5 je připojena LED dioda. Ti bystřejší z vás si mohli všimnout že GPIO se sdružují do osmic (zvaných též "porty"). Když si v datasheetu nalistujete kapitolu "Pinouts and pin description", uvidíte že náš mikrokontrolér (od teď už jen MCU) má porty GPIOA, GPIOB, GPIOC, GPIOD, GPIOE, GPIOF, GPIOG a GPIOI. Jednotlivé vývody v portu se označují číslem mezi 0 a 7 (např. PE0, PC6 atd.). Některé porty neobsahují všech osm pinů. Například GPIOA na našem MCU neobsahuje PA0 a PA7 nebo GPIOI má jen jeden vývod a to PI0. S každým GPIO se dá pracovat naprosto samostatně. Takže třeba PE0 může sloužit k ovládání LEDky, PE1 naopak snímat stav tlačítka a podobně. Navíc ale můžeme portem pracovat jako s celkem, tedy ovládat všech jeho (až) 8 vývodů zároveň (to se vám bude hodit třeba při ovládání segmentovky a možná později i k mnohem sofistikovanějším funkcím). No a my si teď motivačně zablikáme LEDkou a pak se pustíme do ostré práce.
/ Ovládáme LEDku |
#include "stm8s.h"
void main(void){
// tyto příkazy se vykonají jednou po restartu MCU
// LEDku máme na pinu PC5
// nastavíme Pin 5 portu C jako výstup (OUT) typu Push-Pull (PP) s výstupem v log.0 (LOW) a s nízkou (SLOW) rychlostí.
GPIO_Init(GPIOC,GPIO_PIN_5,GPIO_MODE_OUT_PP_LOW_SLOW);
while (1){
// toto se vykonává stále dokola
GPIO_WriteHigh(GPIOC,GPIO_PIN_5); // zapíšeme na PC5 log. úroveň High (log.1) - rozsvítí LED
GPIO_WriteLow(GPIOC,GPIO_PIN_5); // zapíšeme na PC5 log. úroveň Low (log.0) - zhasne LED
}
}
Když si tento kód přeložíte a pomocí debuggeru krokujete, uvidíte že střídavě zhasíná a rozsvěcí LEDku. Když ale program spustíte aby běžel plnou rychlostí, žádné blikání neuvidíte. Program se totiž vykonává tak rychle že LEDku stihne rozsvítit a zhasnout "milionkrát" za sekundu. My se přirozeně časem dopracujeme k tomu jak s LEDkou blikat libovolnou rychlostí, ale kvůli tomu tady teď nejsme. Jsme tu proto abychom se naučili ovládat GPIO. Podívejme se tedy na náš příklad. Obsahoval tři funkce.
- GPIO_WriteHigh - Nastaví na zvoleném pinu (nebo skupině pinů) úroveň High (log.1). Prvním argumentem je port (GPIOA až GPIOI), druhým argumentem je pin (nebo jejich skupina). Piny se zapisují v podobě GPIO_PIN_0 až GPIO_PIN_7 (což jsou předem připravená makra v knihovnách). Chceme-li nastavit více pinů zároveň (na stejném portu) zapisujeme je za sebe oddělené znakem ' | ' (logický OR). Například takto GPIO_PIN_1 | GPIO_PIN_2.
- GPIO_WriteLow - Nastaví na zvoleném pinu (nebo skupině pinů) úroveň Low (log.0). Stejně jako u předchozí funkce je prvním argumentem port (GPIOA až GPIOI) a druhým argumentem je pin (nebo skupina pinů).
- GPIO_Init - Funkce která konfiguruje vybraný pin. Prvním argumentem je port, druhým je pin, třetím argumentem je jeho konfigurace. A právě tem konfiguracím se budeme věnovat nejen zde ale i v dalších dílech.
/ GPIO jako výstup |
Motivaci máme za sebou a začneme pořádně od základů. Tedy od "elektriky", od hardwaru. Oprašte své znalosti o zatěžovací charakteristice zdroje napětí neboť přichází první příklad.
Př.1: Jaké bude svorkové (výstupní) napětí měkkého zdroje 5V s vnitřním odporem 120Ohmu, zapojíme-li na jeho svorky rezistor 1k ? 22k ? 330 Ohm ?
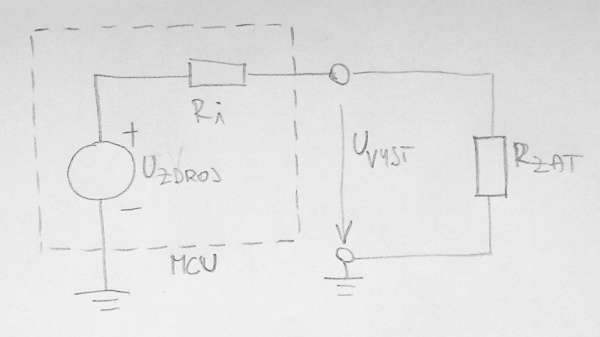
Vnitřní odpor měkkého zdroje se zatěžovacím rezistorem tvoří dělič napětí připojený k 5V zdroji. Stačí tedy spočítat výstupní napětí děliče, to jistě zvládáte, takže nebudeme ztrácet čas odvozováním vztahu a napíšeme rovnou:
Uvyst = Uzdroje * Rzat / (Ri+Rzat) = 5 * 1000 / (120+1000) = 4.46V.
Výstupní napětí zdroje při zatížení rezistorem 1k je 4.46V, při zatížení odporem 22k je 4.97V a při zatížení odporem 330Ohm je 3.67V.
Jestli jste si před rokem mysleli, že vám zrovna tahle "teorie" k ničemu nebude, tak jste na omylu. Protože přesně takhle se chovají výstupy našeho mikrokontroléru. Pin nakonfigurovaný jako výstup typu push-pull se při nastavení do log.1 (úroveň "high") chová jako zdroj napětí 5V s vnitřním odporem přibližně 120 Ohm. Samozřejmě že to platí pro mikrokontrolér napájený napětím 5V. Při napájení 3.3V se chová jako měkký zdroj 3.3V. Zkusme si raději ještě jeden příklad.
Př.2: Jaké bude svorkové (výstupní) napětí měkkého zdroje 0V s vnitřním odporem 70Ohmu zatížíme-li ho proudem -5mA ? (Proud teče směrem do zdroje viz obrázek)
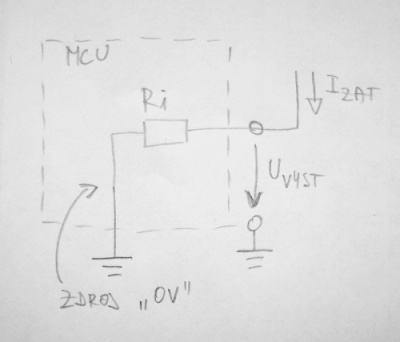
Použijeme Ohmův zákon a spočítáme úbytek napětí na vnitřním odporu
Uri = Izat * Ri = 5m * 70 = 0.35 V
Na výstupní svorce bude napětí přibližně 0.35V.
Tento příklad demonstruje opačnou situaci. Tedy stav kdy je pin nastaven jako výstup s log. úrovní Low (log.0). Opět se chová jako "měkký" zdroj 0V. Jeho vnitřní odpor v tomto stavu bývá okolo 70Ohm. Je tedy o něco "tvrdší" než v log.1. Obě tyto situace si můžete snadno vyzkoušet.
Cv.2: Nastavte pin PB7 jako výstup typu push-pull do úrovně "High". Zapojujte mezi něj a GND postupně rezistory 330Ohm, 1k a 22k a měřte napětí na pinu (proti GND). Sledujte jak moc výsledky měření se shodují s výpočtem z příkladu 1. Poté nastavte pin PB7 jako výstup typu push-pull do úrovně "Low" a připojte mezi něj a 5V napájení rezistor 1k. Změřte proud tekoucí rezistorem a poté napětí na pinu (proti GND). Výsledky srovnejte s Př.2.
Ke konfiguraci použijeme funkci
GPIO_Init. Prvním argumentem bude
GPIOB (protože chceme konfigurovat pin na portu "B"), druhým argumentem bude
GPIO_PIN_7 (protože nastavujeme pin PB7). Třetím argumentem bude
GPIO_MODE_OUT_PP_HIGH_SLOW - nastavuje pin jako výstup typu push-pull a zároveň nastavuje úroveň "High" (log.1)
GPIO_MODE_OUT_PP_LOW_SLOW - nastavuje pin jako výstup typu push-pull a zároveň nastavuje úroveň "Low" (log.0)
void main(void){
// kód tady se vykoná jednorázově po spuštění nebo restartu programu
GPIO_Init(GPIOB,GPIO_PIN_7,GPIO_MODE_OUT_PP_HIGH_SLOW); // nastavíme PB7 jako výstup typu push-pull (LEDka) do úrovně High (log.1)
while (1){
// kód zde se vykonává stále dokola až do vypnutí MCU - zrovna nemá co dělat :)
}
}
Poslední příklad nás přivede k jedné z nejdůležitějších informací.
Př.3:
Spočítejte zkratový proud zdroje o napětí 5V a vnitřním odporu 120 Ohm.
Na to opět postačí Ohmův zákon.
Izkrat = Uzdroj / Ri = 5/120 = 41.7mA
Zkratový proud takového zdroje je přibližně 41.7mA.
Asi tušíte, že tenhle případ nebudeme procvičovat. Jedná se totiž o zkrat výstupu a proud jsme odhadli na něco přes 40mA. Takový zkrat by měl neblahé důsledky pro náš mikrokontrolér. V datasheetu se můžeme dočíst že Maximální povolený proud tekoucí výstupem nebo vstupem je 20mA !. V tomto případě bychom ho tedy překročili 2x a mohli bychom mikrokontrolér zničit. Buďte opatrní a této situaci se vyhýbejte.
/ Detaily pro "zvídavé" |
Vnitřní odpor není konstantních 120 nebo 70 Ohm. Je závislý na zatěžovacím proudu a může se lišit až o desítky procent. Není stejný na všech pinech, některé piny našeho MCU jsou tzv. "High Sink" a mají menší vnitřní odpor když jsou v úrovni Low. Závislosti výstupního napětí na zatěžovacím proudu jsou vykreslené v grafech figure 24 až figure 31 v datasheetu ("Typical output level curves"). Možná se také pozastavujete nad slovíčkem SLOW v konfiguraci výstupu a zamýšlíte se zda existuje taky nějaké FAST ? Ano existuje, volbou SLOW nebo FAST si volíme rychlost přeběhu (strmost hrany přechodu mezi log.1 a log.0). Já jsem se ale rozhodl vám tím zatím neplést hlavu, protože to jsou funkce, které využijete až jako pokročilí. Volba SLOW je pro začátek výhodnější kvůli nižšímu rušení :) Nebojte i tak se jedná o časy v řádu jednotek až desítek nanosekund.
/ K zapamatování |
- Maximální proud tekoucí výstupem MCU je 20mA
- Výstup typu push-pull nastavený do úrovně "High" (log.1) se chová jako měkký zdroj napětí 5V s vnitřním odporem přibližně 120Ohm.
- Výstup typu push-pull nastavený do úrovně "Low" (log.0) se chová jako měkký zdroj napětí 0V s vnitřním odporem přibližně 70Ohm. Nebo též jako rezistor o odporu 70Ohm propojící výstup s GND.
- Konfiguraci pinu jako výstup typu push-pull provádíme funkcí GPIO_Init s argumentem GPIO_MODE_OUT_PP_HIGH_SLOW nebo GPIO_MODE_OUT_PP_LOW_SLOW
- Nastavování logické úrovně "High" a "Low" provádíme funkcemi GPIO_WriteHigh a GPIO_WriteLow
| Odkazy /
Home
| V1.00 27.4.2020 /
| By Michal Dudka (m.dudka@seznam.cz) /